Kartáčové a bezkomutátorové motory: Provoz, design a aplikace – elektronika 2025
Stejnosměrný motor je jednotka, která přeměňuje energii stejnosměrného proudu na mechanický pohyb, nejčastěji na pohyb rotační.
Odrůdy a typy stejnosměrných motorů (DMC)
V současné době jsou známy následující typy stejnosměrných strojů:
- Unipolární (mají nízkou účinnost, a proto se nepoužívají v každodenním životě);
- Sběratel (hlavní kategorie DPT);
- Střídavé (v podstatě se jedná o modifikaci kartáčových motorů, kde je kolektor nahrazen speciální elektronickou jednotkou s měniči).
Sběratel DPT se dělí na:
- Univerzální (vhodné pro stejnosměrný i střídavý proud);
- Jedno-, dvou-, tří-, čtyř-, osmikolektor (liší se konfigurací vnitřních součástí a počtem fází proudu);
- S permanentními magnety;
- S elektrickými magnety.
Elektromagnety zase mohou fungovat podle následujících schémat:
- S nezávislým buzením;
- S konzistentním,
- Paralelní,
- Smíšené zapojení vinutí.
Hlavní součásti DPT
Všechny stejnosměrné elektromotory jsou založeny na struktuře statoru a rotoru:
1. Stator (induktor) je stacionární konstrukce, na které jsou umístěny permanentní magnety nebo elektrické cívky, které vytvářejí elektromagnetické pole. Minimální počet tyčí jsou 2.
2. Rotor (neboli kotva) je rotační konstrukce. Obvykle se skládá ze sady cívek umístěných zvláštním způsobem na centrální ose. Rotor musí mít alespoň 2 magnetické póly.
3. Kolektor je sousední jednotka zodpovědná za aktivaci napájení jedné nebo druhé cívky rotoru. Nejčastěji se používá kartáčové provedení, kdy jsou dva kontakty přitlačeny k vodivým sektorům (lamelám) na kotvě.
Všechny hlavní prvky lze vidět na obrázku níže.
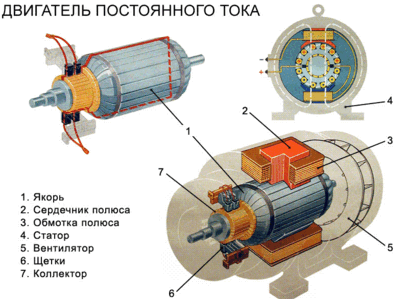
Rýže. 1. Stejnosměrný motor
Aby byl proces snazší pochopit, provoz DPT je nejlepší zvážit na příkladu dvoupólového rotoru.
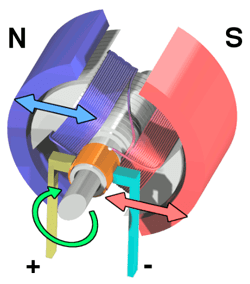
Rýže. 2. Dvoupólový rotor
Při přivedení kladného napětí na vinutí (rotor) umístěné v akčním poli magnetu (statoru) s pólem N otočeným dovnitř cívka generuje elektromagnetické pole stejné polarity. Cívka je odražena od magnetu a začíná se pohybovat. Když cívka opustí pole působení magnetu, její kontakt se otevře a přívod proudu se zastaví. Do pole působnosti magnetu vstupuje další cívka, v tuto chvíli naráží kartáč komutátorové jednotky na lamelu nové cívky a nyní je na ni přivedeno napětí. Proces se opakuje. Totéž se děje s tyčí S.
Permanentní magnety lze nahradit elektrickými cívkami, lze zvýšit počet cívek na kotvě a na rotoru. Kolektor lze nahradit elektronickou řídicí jednotkou, která bude řídit přívod proudu do určitých cívek, přičemž aktuální úhel natočení hřídele bude analyzován speciálním senzorem.
Schéma zapojení závisí na počtu použitých fází (u vícekolektorových) a také na způsobu buzení (relevantní pro statory s elektromagnety).
Uvažujme zapojení pro DPT s elektrickými induktory (statory na elektromagnetech):
1. Nezávislé připojení
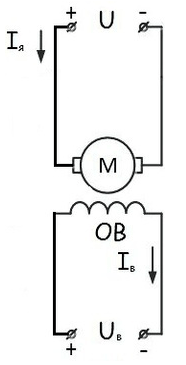
Rýže. 3. Nezávislé připojení
Nezávislé zdroje napětí slouží k eliminaci případných rázů v silovém obvodu při otáčení rotoru (spotřeba probíhá ve vlnách). Toto schéma je ideální pro přesné řízení rychlosti.
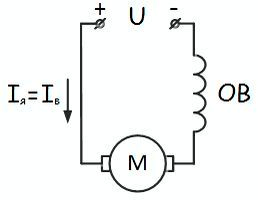
2. Paralelní připojení
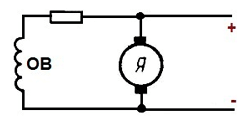
Rýže. 4. Paralelní připojení
Od nezávislých se liší pouze tím, že stator a vinutí kotvy (rotoru) jsou připojeny ke stejnému zdroji napětí.
Nejběžnější schéma připojení.
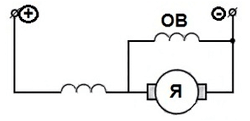
3. Sekvenční zařazení
Rýže. 5. Sekvenční připojení
Tento přístup se používá v případech, kdy je vyžadován plynulý (měkký) rozběh elektromotoru. Při sériovém zapojení bude proud protékající cívkami statoru a rotoru stejný a bez zátěže může tato situace vést k překročení jmenovitých otáček. Musíme být opatrní.
Rýže. 6. Smíšená inkluze
Používá se velmi zřídka. Zde je jedno nebo více statorových vinutí zapojeno paralelně a zbytek sériově.
Ke změně rychlosti otáčení stejnosměrných motorů stačí použít seřizovací odpory ve správných částech obvodů.
Jak a kam instalovat odpor, viz níže.
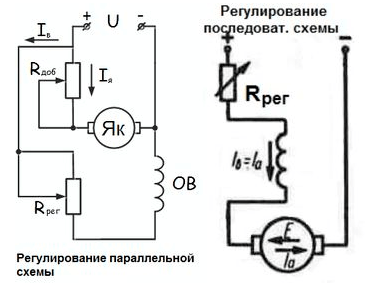
Rýže. 7. Nastavení rychlosti
Aby se hřídel stejnosměrného motoru otáčela v opačném směru, jednoduše změňte polaritu napájecího zdroje.

Elektromotory se staly obrovskou součástí našich životů. Nacházejí se ve všech druzích zařízení, od elektrických vozidel po drony, roboty a další elektronická zařízení. Celkově vzato, Elektromotor je zařízení, které přeměňuje elektrickou energii na mechanickou energii.. Běžně se o nich mluví jako o úplném opaku generátorů, protože fungují na podobných principech a lze je teoreticky přeměnit na generátory. Používají se především v situacích, kdy je vyžadován rotační pohyb a nacházejí uplatnění v domácích spotřebičích (vibrační motory), robotech, lékařském vybavení, hračkách a mnoha dalších.
Elektromotory lze rozdělit do dvou širokých kategorií v závislosti na typu zdroje energie, který používají: Střídavé a stejnosměrné motory. Jak název napovídá, AC motory jsou obvykle napájeny ze zdrojů střídavého proudu (jednofázové nebo třífázové) a používají se hlavně v průmyslových a těžkých aplikacích, kde je vyžadován vysoký točivý moment. С druhá strana, DC motory (na které se dnes zaměřujeme) jsou obvykle menší velikosti a používají se v bateriových (nebo stejnosměrně připojených) aplikacích, kde je potřeba podstatně méně práce než u střídavých motorů. Nacházejí uplatnění v několika zařízeních, od běžných zařízení, jako jsou strojky na stříhání vlasů a holicí strojky, až po hračky pro děti, roboty a drony.
Požadavky na stejnosměrné motory se liší od jedné aplikace k druhé, protože jedna aplikace může vyžadovat větší točivý moment a nižší rychlost, zatímco jiná může vyžadovat vyšší rychlost a menší točivý moment, takže stejnosměrné motory jsou někdy klasifikovány prodejci na základě tohoto. Však Stejnosměrné motory lze rozdělit do tří různých kategorií nebo typů, jako:
- Kartáčovaný DC motor
- Bezkomutátorové stejnosměrné motory
- Servomotory.
V dnešním článku se zaměříme na bezkomutátorové a kartáčované stejnosměrné motory, protože zkoumáme rozdíl mezi nimi z hlediska principu fungování, designu, použití, výhod a nevýhod. U třetího typu se můžete podívat na podrobný článek o servomotoru.
Princip a design
Činnost všech motorů je obecně založena na dvou principech, kterými jsou ; Ampérův zákon a Faradayův zákon. V První zákon říká, že na elektrický vodič umístěný v magnetickém poli bude působit síla, jestliže jakýkoli proud procházející vodičem má složku v pravém úhlu k této oblasti. V Druhý princip říká, že pokud se vodič pohybuje magnetickým polem, pak jakákoli složka pohybu kolmá k tomuto poli vytvoří potenciálový rozdíl. mezi konce vodiče.

Podle těchto zákonů se elektromotory skládají ze dvou hlavních částí; Permanentní magnet a svazek vodičů stočený do cívky. Přivedením elektřiny na cívku se z ní stane magnet a na základě toho, že se magnety na stejných pólech odpuzují a na opačných přitahují, je dosaženo rotačního pohybu.
Kartáčovaný DC motor
Kartáčovaný stejnosměrný motor je známý jako jeden z prvních a nejjednodušších motorů, protože tím nejjednodušším způsobem implementuje výše popsané zákony. Jak je popsáno na obrázku níže, Konstrukce kartáčovaného stejnosměrného motoru sestává ze stacionárního statoru složeného z permanentního magnetu a pohyblivé kotvy (rotor), na kterém jsou kolem motoru uspořádány komponenty jako komutátor, kartáče a dělený kroužek. hřídel.
Při napájení motoru (přes baterii nebo přes střídavý na stejnosměrný zdroj připojený ke zdroji energie) proudí elektřina ze zdroje do kotvy přes kartáče, které jsou obvykle umístěny na opačných stranách hřídele motoru. Kartáče (jejichž přítomnost v konstrukci je hlavním faktorem určujícím název motoru) přenášejí elektrický proud do kotvy fyzickým kontaktem s komutátorem. Jakmile je kotva (cívka drátu) nabuzena, začne se chovat jako magnet, v tomto okamžiku začnou její póly odpuzovat póly permanentního magnetu, který tvoří stator. Když se póly vzájemně odpuzují, hřídel motoru, ke kterému je kotva připevněna, se začne otáčet rychlostí a točivým momentem, které závisí na síle magnetického pole kolem kotvy.
Síla magnetického pole je obvykle funkcí napětí aplikovaného na kartáče a síly permanentního magnetu použitého pro stator.

Bezkomutátorové stejnosměrné motory
Využívají sice stejný princip elektromagnetismu, ale na druhou stranu bezkomutátorové motory jsou složitější. Jsou přímým výsledkem snah o zlepšení účinnosti kartáčovaných stejnosměrných motorů a lze je jednoduše popsat jako motory, které ke komutaci nepoužívají kartáče. Zjednodušený charakter tohoto popisu však vede k otázkám, jak je motor napájen a jak je dosaženo bezkomutátorového pohybu, které se pokusím vysvětlit.
Na rozdíl od konstrukce kartáčových motorů je u bezkomutátorových motorů vše naopak. Kotva, která se u kartáčového motoru otáčí uvnitř statoru, je u bezkomutátorových motorů nehybná a permanentní magnet, který je u kartáčových motorů stacionární, slouží jako rotor u bezkomutátorového motoru. Jednoduše řečeno, stator bezkomutátorového stejnosměrného motoru se skládá z cívek a jeho rotor (ke kterému je připevněna hřídel motoru) je tvořen permanentním magnetem..

Vzhledem k tomu, že bezkomutátorový motor eliminuje použití kartáčů pro napájení kotvy, přepínání (komutace) se stává složitější a je prováděno elektronicky pomocí další sady elektronických součástek (jako je zesilovač poháněný komutační součástí, jako je optický kodér), aby se dosáhlo pohybu. Komutační algoritmy pro bezkomutátorové stejnosměrné motory lze rozdělit do dvou; Senzorické a nesmyslné přepínání.
Při přepínání na základě Senzory Senzory (jako je Hallův senzor) jsou umístěny podél pólů motoru, aby poskytovaly zpětnou vazbu řídicímu obvodu a pomohly mu odhadnout polohu rotoru. Existují tři oblíbené algoritmy používané pro přepínání založené na senzorech;
- Lichoběžníková komutace
- Sinusová komutace
- Vektorové (nebo pole) řízení.
Každý z těchto řídicích algoritmů má své výhody a nevýhody a algoritmy mohou být implementovány odlišně v závislosti na návrhu softwaru a elektronického hardwaru, aby bylo možné provést potřebné změny.
С na druhé straně, bezsenzorové spínání, namísto umístění senzorů do motorů je řídicí obvod navržen tak, aby změřil zadní EMF pro odhad polohy rotoru.
Tento algoritmus funguje docela dobře a má nižší cenu, protože nevyžaduje náklady na Hallovy senzory, ale jeho implementace je mnohem složitější ve srovnání s algoritmy založenými na senzorech.
Výhody a nevýhody
U kartáčovaných stejnosměrných motorů jsou kartáče v neustálém kontaktu s rotujícím komutátorem. To vede ke vzniku výrazné tření, které následně vede ke ztrátě energie v důsledku zahřívání a postupnému opotřebení kartáčů. Proto mají kartáčované stejnosměrné motory nízkou účinnost a vyžadují pravidelnou údržbu. To vytváří velké tření a tření se rovná teplu (ztrátě energie) a opotřebení. Na druhou stranu bezkartáčový DC motory nemají prakticky žádné tření a proto mají opravdu vysokou účinnost, nevyžadují údržbu a sloužit delší než kartáčované stejnosměrné motory.
Ale Kartáčované stejnosměrné motory jsou ve srovnání s jejich bezkomutátorovými protějšky velmi levné díky svému jednoduchému designu. Na druhou stranu jsou bezkomutátorové stejnosměrné motory poměrně drahé kvůli jejich složité konstrukci a dodatečným nákladům na další elektronické součástky (řadiče) nutné k jejich pohonu.
Aplikace
Zatímco bezkomutátorové stejnosměrné motory jsou v dnešní době populárnější, kartáčované stejnosměrné motory se stále používají v každodenních domácích spotřebičích, dětských hračkách a průmyslových aplikacích, protože jejich poměr rychlosti a točivého momentu lze snadno měnit. Kvůli jejich nízké ceně se používají v aplikacích, kde by hostitelské zařízení mohlo selhat dříve než motory.
Na druhou stranu bezkomutátorové stejnosměrné motory našly uplatnění ve všech druzích zařízení, od lékařského vybavení, robotů a dronů až po elektrická vozidla, elektrické nářadí atd. Používají se především v aplikacích, které vyžadují vysokou účinnost, odolnost a hospodárnost.
Faktory, které je třeba vzít v úvahu při výběru mezi bezkomutátorovými a kartáčovými stejnosměrnými motory
Kromě rychlosti, točivého momentu, jmenovitého výkonu a dalších základních požadavků pro vaši aplikaci jsou níže uvedeny tři faktory, které by podle mého názoru měly být také zváženy při rozhodování o typu motoru pro vaši aplikaci.
- Pracovní cyklus/životnost
- Účinnost
- Ovládání / ovládání
- Stát
Pracovní cyklus/životnost
Životnost popisuje, jak dlouho by měl motor fungovat před poruchou a v jakém pracovním cyklu. To je důležité, protože kartáčovaný stejnosměrný motor, jak bylo zmíněno dříve, podléhá opotřebení v důsledku tření mezi kartáči a komutátorem. Proto je důležité zajistit, aby se jednalo o aplikaci, kde motor bude pracovat po celou dobu své životnosti, nebo o aplikaci, kde bude údržba motoru považována za normální a nenákladnou, pokud se použijí kartáčované stejnosměrné motory. Dobrým příkladem toho jsou dětské hračky, kde se hračky obvykle vyhodí nebo poškodí dříve, než se opotřebuje motor. V aplikacích s dlouhou životností motoru a údržbou není praktické použití bezkomutátorové stejnosměrné motory.
Zpravidla Bezkomutátorové stejnosměrné motory mají vyšší celkovou účinnost než kartáčové motory motory trvalý proudu, ale vyskytly se případy, kdy bezželezné kartáčované motory s jádrem měl vyšší účinnost ve srovnání s ekvivalentními bezkomutátorovými motory. Před rozhodnutím je však důležité vyhodnotit celkovou požadovanou účinnost a porovnat ji s účinností každého motoru. Ve většině případů, kde je účinnost rozhodujícím faktorem, obvykle vítězí bezkomutátorové stejnosměrné motory.
Ovládání / ovládání
To je obvykle jeden z hlavních problémů, pokud jde o použití bezkomutátorových stejnosměrných motorů. Další požadavky, jako jsou ovladače atd., činí ovládání složitějším ve srovnání s kartáčovými stejnosměrnými motory, které lze ovládat/pohánět tak triviálními metodami, jako je připojení baterie k jejím svorkám. Musíte se ujistit, že množství složitosti spojené s používáním bezkomutátorového stejnosměrného motoru pro váš projekt je oprávněné a že podpůrná elektronika, jako jsou ovladače, je snadno dostupná. Přes jednoduchost kartáčovaných stejnosměrných motorů někdy nejsou vhodné pro vysoce přesné aplikace. Zatímco kartáčovaný DC motor lze snadno připojit k ovladači, jako je Arduino, je velmi obtížné připojit BLDC k Arduino Uno, nicméně ESC (elektronický regulátor otáček) zjednodušuje interakci BLDC s mikrokontrolérem.
Stát
Složitost konstrukce bezkomutátorových stejnosměrných motorů je činí opravdu drahými ve srovnání s kartáčovanými stejnosměrnými motory. Před přechodem na bezkomutátorové stejnosměrné motory se ujistěte, že dodatečné náklady jsou v rámci rozpočtu vašeho projektu. Před rozhodnutím zvažte také náklady na další příslušenství potřebné k použití BLDC.